 中文
中文
 English
English

專注光譜傳感和光電應用系統
電話:86-0755-23229824
手機:18948346937 / 13510373651
地址:深圳市寶安區沙井街道后亭茅洲山工業園工業大廈全至科技創新園科創大廈11層C
微信:
微信客服號:
抖音官方號:
無人機高光譜臨安山分析案例
1.什么是高光譜
成像光譜技術由分光計發展而來,它是一項新技術,又名高光譜成像技術,傳統的光譜分析技術只能做局部平均光譜分析,而高光譜能夠做到整幅圖的各個點光譜分析。成像光譜有凝視成像型、推帚型、擺掃型。它能夠在生成一副圖像的同時獲取這副圖像每個像素點的光譜信息,實現“圖譜合一”。高光譜獲取的光譜信息能夠包括圖像中任何一個像素點的光譜,而普通的地物光譜儀只能獲取測試地物的平均光譜,所以高光譜獲取的數據能夠跟準確、精細地去分析被測地物。它的出現標志著光學遙感進入了高光譜遙感階段,利用從高光譜數據反演的地物反射光譜特征,能研究地球表面物體的分類、物質的成分、含量、存在狀態、空間分布及動態變化。
1.1無人機高光譜遙感技術
高光譜遙感技術發展于20世紀80年代,其結合了傳統的光譜探測和攝影成像技術,可同時獲取目標的空間信息、光譜信息和輻射信息,形成圖譜合一的數據立方體。與多光譜遙感技術相比,高光譜遙感技術能夠在一個連續的光譜范圍內進行窄帶成像,因此光譜分辨率更高、信息分辨能力更強,可以實現精確的目標分類和地物識別。目前,高光譜遙感系統已經歷了從航空平臺到航天平臺的發展過程,隨著遙感技術的不斷發展,研究者發現星載高光譜儀器雖然可以提供長時間、大尺度的數據,但受衛星重訪周期的限制,空間分辨率和時 間分辨率較差;航空高光譜儀器雖然空間分辨率較高,但對氣象條件和使用環境有苛刻要求,且需要有專業支持團隊,成本高昂,靈活性較差。
隨著微機電系統(MicroElectroMechanicalSystem,MEMS)、控制與導航系統及信息處理技術的發展,無人機(UnmannedAerialVehicle,UAV)作為新型遙感平臺的條件逐漸成熟,同時大量微型化、高性能高光譜傳感器的研發也推動了無人機與高光譜遙感的結合。作為一種新興的遙感技術,無人機高光譜遙感可以克服云層的影響,快速、精確地向研究者提供高空間分辨率和時間分辨率的高光譜數據,有效地填補了低空高光譜遙感數據的空白。無人機高光譜遙感技術在自然資源調查領域有著巨大的技術與經濟比較優勢。首先,航空、航天平臺的高光譜數據獲取周期從幾個月到幾年不等,難以對一些短期的變化現象進行觀測和研究。其次,一些地形陡峭、植被密集的區域,調查人員難以涉足,無法進行有效的實地調查。使用無人機高光譜遙感技術, 能夠有效解決以上問題,為研究人員提供多時態、高分辨率的高光譜數據,有效降低了高光譜遙感技術的實施成本,極大簡化了自然資源調查的流程。
2.1典型地物光譜特征
大量的光譜波段提供了不同且極其豐富的地物遙感信息,直接基于地物的吸收譜線的分析,是辨別地物類型,獲取地物性質的最基本也是最有效的方法,因為不同類型的地物具有不同特征的吸收譜線。表2-1列出了波段范圍內的一些顯著的地物光譜特征。
表2-1 不同波段區間的光譜吸收特征
波段號 | 波長范圍(nm) | 光譜吸收特征 |
1 | 450-520 | 藍綠光區,水體最大透過率的位置 |
2 | 520-600 | 綠光區,匹配植被的綠光反射峰 |
3 | 630-690 | 紅光區、用于判定植物類型的葉綠素吸收帶 |
4 | 760-900 | 近紅外反射區、可用于確定生物量參數和海岸帶制圖 |
5 | 1550-1750 | 紅外反射區、用于分析土壤含水量和植被覆蓋 |
6 | 2080-2350 | 近紅外反射區、熱液蝕變引起的礦物吸收譜帶 |
不同的地物在不同的波段內響應都不同,瀝青、水泥地以及其他的一些人工地物在可見光范圍內的光譜反射率隨著波長增加而增加;各種類型的植被光譜反射率曲線在不同波段都有以下幾種特點:在可見光區內植物光譜反射率會有一個極大值和一個最小值,分別在550到560nm之間和650到680nm之間,而且在近紅外(730-1000nm)光譜區有一段較平緩和比較高的反射率;本次測量將會測量幾種不同的植被,并且根據獲取的光譜信息對植被進行不同的分析。
2.2植被光譜特征
用地物光譜儀獲取的光譜反射率可以表現出不同植物類型的光譜特征,又能通過光譜特征去研究反演出植被的組織結構、環境條件、元素含量。一般來說,健康的綠色植物的光譜曲線總是會呈現很明顯的“高反射峰”和“低反射谷”。如圖2-1植被的反射光譜特征和其他地光譜特征不一樣。

圖2-1植被反射光譜特征
經過對圖2.1的分析,可以得知健康綠色植被光譜曲線主要有以下的特點:(1)在可見光波段(400-760nm)有一個小的反射峰,兩側有兩個吸收帶,即在450nm和670nm 波段為反射低谷,這是由于葉綠素對藍光和紅光吸收作用強,而對綠光反射作用強的原因。(2)植被的最獨特的特征就是在700-800nm有一個斜率很大、變化很大的反射曲線,在1100nm處到達峰值。(3)由于葉子內部的含水量的強烈吸收作用,除了在970nm有一個小的吸收段外,在1400nm,1900nm和2700nm處有三個顯而易見的低反射谷。(4)此外在1600nm和2200nm處也有兩個反射峰。
2.3 植被光譜的特征參數
為了更好地研究植被的反射率光譜,人們提出了一系列的植被系數來研究植被的光譜特征,這些參數能夠更好地反映植被本身的生長情況、葉綠素含量等參數,可以更好地幫助人們研究植被本身生長狀況、生長趨勢等等。表2-2列出了常用的植被光譜特征參數。
表2-2 常用植被光譜特征參數
植被光譜特征參數 | 參數對應的植物特征 |
紅邊(RE) | 紅邊是植被在670~740nm之間反射率增高最快的點,也是一階導數光譜在該區間的拐點,是綠色植被最顯著的標志。 |
藍邊(BE) | 藍邊是指藍色光在490~530nm之間反射率一階導數的最大值位置。 |
黃邊(YE) | 黃邊是指黃色光在550~582nm之間反射率一階導數的最小值位置。 |
歸一化差異植被指數(NDVI) | NDVI一般指近紅外波段反射率和可見光波段反射率的差值與其和值的比值。NDVI=(NIR-R)/(NIR+R) NDVI可以很好的反映植被本身的生長狀況、植被覆蓋率等;當-1<=NDVI<=1,則說明R>NIR,一般有這樣的反射率的地面覆蓋為云、水等;若NDVI=0,則代表R=NIR,說明被測地物為巖石;當NDVI>1,說明被測地物有植被,而且隨著植被占比的提高而提高;NDVI的劣勢在于,它不是以線性拉伸的形式呈現NIR與R的反射對比度,這導致了在植被占比較高的區NDVI的靈敏度降低;NDVI與植被占比相關,可以反映出被測區域是否有土壤、枯葉等背景影響。 |
差值植被指數(DVI) | DVI能很好地反映植被覆蓋度的變化,但對土壤背景的變化較敏感,當植被覆蓋度在15%~25% 時,DVI隨生物量的增加而增加,植被覆蓋度大于80% 時,DVI對植被的靈敏度有所下降。DVI=NIR-R |
歸一化水指數(NDWI) | McFeeterst 根據水體與其他地物的光譜響應的差異提出了歸一化差值水體指數(NDWI),即利用綠光波段和近紅外波段的差異比值來增強水體信息,并減弱植被、土壤、建筑物等地物的信息。NDWI對冠層水分含量的變化非常敏感,在857 nm 和 1241 nm具有相似的反射率,但是又不同于液態水的吸收特性。應用于冠層脅迫性分析,在濃密葉型植被的葉面積指數的研究,植被生產力模型,著火性研究。它隨植被葉面水含量的增加而增加。 |
比值植被指數(RVI) | RVI=NIR/R 1、值的范圍: 0-30+,一般綠色植被區的范圍是2-8,無植被覆蓋的地面 (裸土、人工建筑、水體植被枯死或嚴重蟲害)的RVI在1附近。 2、RVI與LAI、葉干生物量(DM)、葉綠素含量相關性高,可用于檢測和估算植物生物量; 與植被覆蓋度:當植被覆蓋度較高時,RVI對植被十分敏感,當植被覆蓋度<50%時,敏感性顯著降低; 3、局限:RVI受大氣條件影響,大氣效應大大降低對植被檢測的靈敏度,所以在計算前需要進行大氣校正,或用反射率計算RVI。 |
3.1無人機高光譜采集流程及注意事項
3.1.1注意事項
①天氣選擇:晴朗無風
? 高光譜數據采集禁止在雨天、冰雹、大風天及其他極端天氣進行數據采集;
? 溫度過高(南方夏天零上 35℃以上)或者過低(北方冬天零下 10℃以下)需考慮無人機電池電量問題;
? 多云、強風的天氣采集數據會極大的影響的數據質量;建議 3-4 風力等級以下;
? 6 旋翼(例如 M600)無人機的抗風等級相對較高;
? 4 旋翼(例如 M300)無人機的抗風等級相對較低;
②采集時間選擇:10:00-14:00(北京時間)
? 高光譜的數據采集盡量選擇在陽光正射被測物的時間,可根據自己的地理(經緯度)位置選擇數據采集時間段;
③飛行場地選擇:地勢平坦且無障礙物
? 山地飛行建議通過衛星圖或者實際測高圖觀測附近山體高度后再規劃無人機航帶;
? 城市飛行需考慮城市建筑物高度,需在空曠的場地起飛。(保證無人機不會在電磁復雜環境或者遮擋視線的建筑物附近起飛);
? 水面飛行需考慮水面上面的風力等級以及數據拼接時有無靶標物識別等;
3.1.2數據采集流程
①環境考察:數據采集前要了解數據采集場地的周邊環境以及準備采集時間的天氣狀況,必要時需要提前到現場觀測;
②出行清單確認;
③儀器電量確認;
④采集現場設備安裝:無人機-遙控器連接;無人機-地面工作站-地面控制終端連接;數據采集軟件起飛前調試;
⑤無人機系統起飛調試:參數設置;航帶規劃;
⑥數據導出;
4.數據獲取及處理
4.1數據獲取
本次測試使用iSpecHyper-VM100無人機高光譜(圖4-1),其光譜范圍400-1000nm,光譜通道數260,空間通道數348(4像元合并),探測器為高靈敏度CCD,成像鏡頭35mm,視場角為14.4°@f=35mm以及10%標準反射率板。(本次未使用地物光譜儀iSpecField-HH,其光譜范圍300-1100,波長精度±1nm,分辨率≤3nm,光譜通道數1600,探測器2048像素)

圖4-1 iSpecHyper-VM100無人機高光譜

圖4-2 航帶規劃圖
4.2數據處理
高光譜數據測量自帶幾何校正及拼接,整體做反射率轉換,再截出部分數據做NDVI、DVI等植被系數反演。

圖4-3高光譜數據拼接圖

圖4-4 高光譜掃描圖部分截圖
通過反射率反演出以下五組圖。
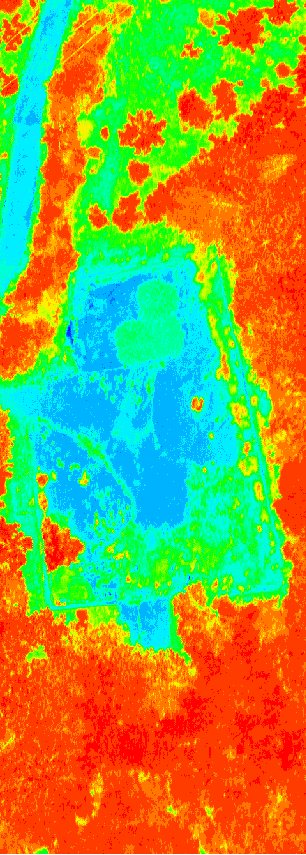

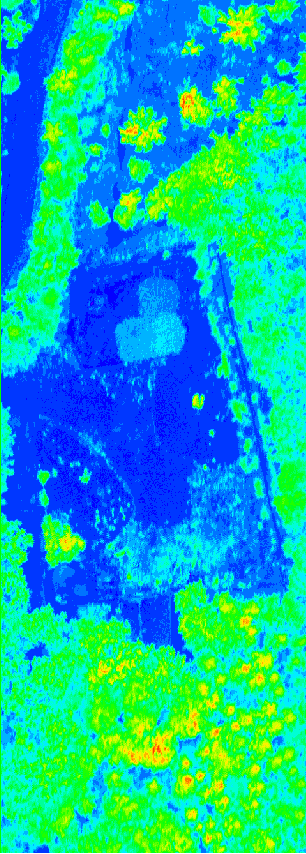

NDVI反演圖 DVI反演圖
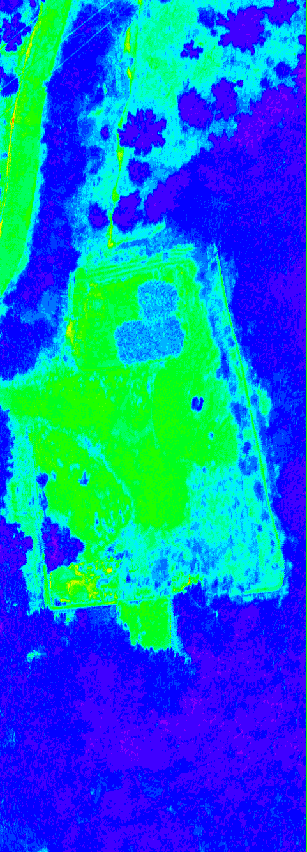
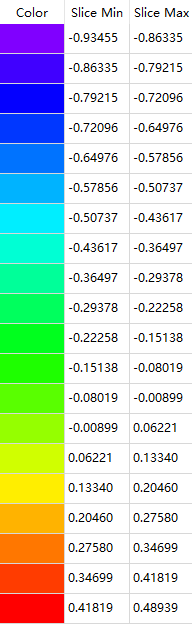
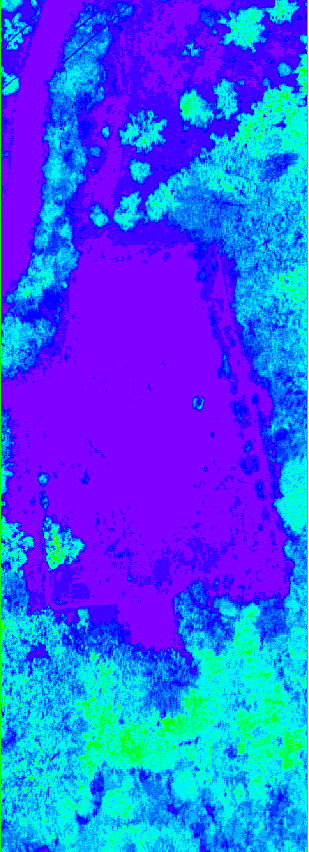

NDWI反演圖 RVI反演圖
本次測試能直觀體現臨安山植被的生長狀況,但僅為高空遙感測試,還需用地物光譜儀(圖4-5)同時進行現場采樣,將采樣數據進行模型選擇、模型構建后,再與高光譜數據進行比對,以獲得更加完善、準確的反演圖。用無人機高光譜測量可實現大范圍檢測,可以更加高效地研究地球表面物體的分類、物質的成分、含量、存在狀態、空間分布及動態變化。

圖4-5 便攜式地物光譜儀iSpecField-NIR

















































