 中文
中文
 English
English

專注光譜傳感和光電應(yīng)用系統(tǒng)
電話:86-0755-23229824
手機(jī):18948346937 / 13510373651
地址:深圳市寶安區(qū)沙井街道后亭茅洲山工業(yè)園工業(yè)大廈全至科技創(chuàng)新園科創(chuàng)大廈11層C
微信:
微信客服號:
抖音官方號:
用于太陽能反射波段的機(jī)載校準(zhǔn)的高精度太陽能漫射器BRDF測量
1.引言
在太陽反射波段,基于太陽漫射體(SD)的在軌校準(zhǔn)方法可以實現(xiàn)光學(xué)遙感器的全孔徑、全視場和端到端的絕對輻射校準(zhǔn)。SD的雙向反射分布函數(shù)(BRDF)是影響在軌校準(zhǔn)精度的關(guān)鍵參數(shù)。在發(fā)射前,需要在實驗室中對SD BRDF進(jìn)行高精度測量。由于測角儀系統(tǒng)的不確定性、偏振效應(yīng)以及其他因素,在大入射角下,SD BRDF的測量不確定性遠(yuǎn)高于在0°入射天頂角和45°反射天頂角下的測量不確定性。本文報道了一種絕對BRDF測量裝置。該測角系統(tǒng)由高亮度積分球作為輻射源、六軸機(jī)器人手臂和大型旋轉(zhuǎn)臺組成。測量波長范圍從350 nm到2400 nm。
光學(xué)遙感器需要進(jìn)行絕對輻射校準(zhǔn)以量化傳感器對已知輻射輸入的響應(yīng)。盡管遙感器在發(fā)射前已經(jīng)進(jìn)行了高精度校準(zhǔn),但在運(yùn)輸、發(fā)射和在軌操作過程中,其性能不可避免地會發(fā)生變化。因此,需要進(jìn)行在軌校準(zhǔn)。在各種在軌校準(zhǔn)方法中,基于太陽漫射體(SD)的在軌校準(zhǔn)方法具有高頻率、全孔徑、全視場和端到端的特點(diǎn)。這是當(dāng)前太陽反射波段中主流的在軌校準(zhǔn)方法。在這種校準(zhǔn)方法中,利用SD反射的太陽輻射作為高輻射源。當(dāng)傳感器孔徑在觀測SD時,其輻射亮度直接受到SD BRDF的影響。因此,SD BRDF是決定在軌校準(zhǔn)不確定性的關(guān)鍵參數(shù)。
BRDF能夠準(zhǔn)確描述物體的空間和光譜特性。它定義為從給定方向照射到物體表面的輻照度與其在另一方向反射的輻射亮度之比。用于在軌校準(zhǔn)的初始SD BRDF只能在發(fā)射前的實驗室中測量。進(jìn)入軌道后,可以通過SD穩(wěn)定性監(jiān)測器或備用SD來監(jiān)測BRDF的穩(wěn)定性。
2.絕對BRDF測量原理
BRDF 可以定義為:

其中,dLr,表示由無限小元素在給定方向上反射的輻亮度;dEi表示從入射方向落在此無限小表面上的輻照度;θi和φi;分別表示入射方向的天頂角和方位角;θr和φr,分別表示反射方向的天頂角和方位角;λ代表波長。Θi,φi,θr,φr的幾何關(guān)系如圖1所示。
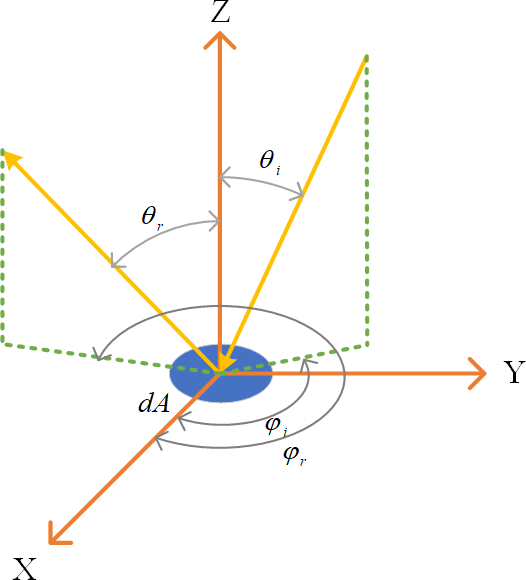
圖1 入射光束和反射光束的幾何關(guān)系
根據(jù)輻亮度和輻照度的定義:

其中,dE?(λ)和dE?(λ)分別表示當(dāng)入射方向垂直于樣品時的輻照度和輻亮度,Ω代表照明立體角。
方程(2)可以代入方程(1),同時對兩邊積分:

這些測量可以在狹窄的立體角和小表面上進(jìn)行;輻射源的輸出在空間方向上是均勻的。用于機(jī)載校準(zhǔn) 的SD是一個幾乎完美的漫射器。因此,f(θi,φi;θr,φr;λ)和L?(λ)可以認(rèn)為是常數(shù)。
然后:

其中,R表示從輻射源開口到樣品中心的距離,A表示輻射源開口的面積。方程(4)表明,通過測量入射輻亮度、照明立體角和反射輻亮度,可以獲得所需的SD BRDF。
入射輻亮度和反射輻亮度使用相同的檢測系統(tǒng)進(jìn)行測量,最終的BRDF計算僅需要入射輻亮度與反射輻亮度的比率;因此,不必知道測量的輻亮度的絕對值。因此,方程(4)可以表示為:

其中,DN(θi,φi;θy,φr;λ)和DN?(λ)分別表示探測器測得的反射和入射輻亮度的數(shù)字量(DN)。為簡化表達(dá)式,本文中從DN中減去了暗電流。
3.設(shè)施描述與校準(zhǔn)
一個絕對BRDF測量裝置如圖2所示。它由三部分組成:一個輻照系統(tǒng)、一個測角儀系統(tǒng)和一個檢測系統(tǒng)。所有設(shè)備都連接到同一臺工業(yè)控制計算機(jī)。樣品的BRDF可以通過控制軟件自動測量。

圖2 絕對BRDF測量裝置
照明系統(tǒng)
選擇積分球作為輻射源,以確保滿足照明系統(tǒng)的亮度和均勻性要求,并減少偏振對測量結(jié)果的影響。

圖3 一體化球形散熱器
圖3展示了球體輻射器的內(nèi)涂層。涂層由壓制的PTFE制成,反射率超過99%。球體的內(nèi)徑為150 mm,內(nèi)置三個400 W的鹵素?zé)簟G蝮w配備了水冷和空氣冷卻系統(tǒng)。當(dāng)球體輻射器工作時,電源設(shè)定為1000 W(約為額定功率的80%)。在球體輻射器出口前加裝了雜散光罩,以減少測量過程中雜散光的影響。
為了驗證球體輻射器的均勻性,搭建了一個專門的均勻性測量設(shè)施。選擇1:1成像比例的成像光學(xué)系統(tǒng),并將其安裝在二維XY平移臺上。步進(jìn)間隔設(shè)定為2 mm,掃描區(qū)域覆蓋球體輻射器的整個開口。結(jié)果顯示,開口的非均勻性小于0.5%。

圖4球形散熱器穩(wěn)定性試驗結(jié)果
球體輻射器的穩(wěn)定性可以通過設(shè)施的檢測系統(tǒng)來監(jiān)測。設(shè)施調(diào)整到測量入射輻射的位置,將高精度電流源的輸出功率設(shè)定為1000 W,測量波長為350 nm。經(jīng)過30分鐘的預(yù)熱后,測量持續(xù)80分鐘,采樣間隔為20 ms。結(jié)果如圖4所示。穩(wěn)定性以相對標(biāo)準(zhǔn)偏差表示,光源的不穩(wěn)定性在80分鐘內(nèi)小于0.06%
測角儀系統(tǒng)
測角儀系統(tǒng)的六軸機(jī)器人手臂和大型旋轉(zhuǎn)臺如圖5所示。機(jī)器人手臂用于三維旋轉(zhuǎn)樣品,旋轉(zhuǎn)臺用于一維旋轉(zhuǎn)照明系統(tǒng)。檢測系統(tǒng)固定,以確保高精度輻射測量。

圖5 測角儀系統(tǒng)
該設(shè)施的 BRDF 測量角度范圍如表 1 所示。
表1 BRDF 測量的角度范圍
角度參數(shù) | 范圍 (° ) | 備注 |
入射天頂角 (θi ) | 0–75 | 由于輻射源的遮擋,入射光線與反射光線之間的角度大于10? |
入射方位角 (?i ) | 0–360 | |
反射天頂角 (θr ) | 0–75 | |
反射方位角 (?r ) | 0–360 |
在SD表面定義了兩個坐標(biāo)系:機(jī)器人工具坐標(biāo)系XYZ和BRDF坐標(biāo)系xyZ。它們共享一個公共坐標(biāo)原點(diǎn),該原點(diǎn)位于樣品的中心。這一點(diǎn)也是旋轉(zhuǎn)階段期間旋轉(zhuǎn)軸與球形輻射源開口中心線的交點(diǎn)。圖5顯示了兩個坐標(biāo)系統(tǒng)的相對位置。機(jī)器人手臂繞機(jī)器人工具坐標(biāo)系XYZ軸的旋轉(zhuǎn)角度可以定義為ɑ、β、γ、δ而旋轉(zhuǎn)階段的旋轉(zhuǎn)角度為δ。根據(jù)在兩個坐標(biāo)系中,入射矢量、反射矢量和樣品法線之間的不同表達(dá)關(guān)系,θi、Φi、θr、Φr與α、β、γ、δ之間的關(guān)系可以建立如下:

對于給定的BRDF角度(θi、Φi、θr、Φr),機(jī)器人手臂和旋轉(zhuǎn)階段的旋轉(zhuǎn)角度(ɑ、β、γ、δ)可以通過方程(6)-(9)計算出來。然后,根據(jù)計算出的ɑ、β、γ、δ旋轉(zhuǎn)測角儀系統(tǒng),以實現(xiàn)測量所需的幾何關(guān)系。
檢測系統(tǒng)
SD可以將入射輻射反射到半球體中,因此在測量過程中只有一小部分入射輻射被收集。設(shè)施的檢測立體角非常小,約為0.003 sr,根據(jù)輻射源的不同入射角,入射輻射和反射輻射之間的差異約為四個數(shù)量級。對于不同的測量波長,這一差異甚至可能超過四個數(shù)量級。在如此大的動態(tài)范圍內(nèi),需要確定并校正檢測系統(tǒng)的非線性。
檢測系統(tǒng)有兩種配置。一種是單色儀、探測器和皮安計的組合;另一種是傅里葉變換紅外(FTIR)光譜儀。這兩種檢測裝置共享相同的前端光路系統(tǒng)。根據(jù)所需波長,使用平面反射鏡和電動平移平臺的組合來切換光路。
前端光路如圖6所示。它由五個平面鏡、三個凹面鏡和一個電動平移平臺組成。來自樣品的反射輻射經(jīng)過平面鏡1和平面鏡2反射后與光路平臺平行,然后經(jīng)過凹面鏡1匯聚。然后,光線被平面鏡3反射到光路切換裝置,該裝置由電動平移平臺和平面鏡組成。通過光路切換裝置后,凹面鏡將光線匯聚到單色儀或FTIR光譜儀的光學(xué)入口。
電動平移平臺控制平面鏡的前后移動。如圖2所示,當(dāng)平面鏡位于光路切換裝置的紅色虛線框位置時,它將輻射反射到FTIR光譜儀的光學(xué)入口。而當(dāng)其完全移開(位于黃色虛線框位置)時,輻射進(jìn)入單色儀的光學(xué)入口。

圖6 檢測系統(tǒng)的光路圖
電動平移平臺控制平面鏡的前后移動。根據(jù)圖2,當(dāng)平面鏡位于光路切換裝置上的紅色虛線框位置時,它將輻射反射到FTIR光譜儀的光學(xué)入口。此外,當(dāng)平面鏡完全移除(位于黃色虛線框位置)時,輻射進(jìn)入單色儀的光學(xué)入口。
在這兩種配置下,檢測設(shè)備的性能如下:
單色儀、探測器和皮安表:單色儀在350nm到600nm波長范圍內(nèi)的光譜分辨率約為3nm,在600nm到1700nm波長范圍內(nèi)的光譜分辨率約為6nm。根據(jù)不同的測量波長,配備了兩種類型的探測器:硅探測器(350nm到1000nm)和lnGaAs探測器(1000nm到1700nm,雙級TE制冷,-40°C)。所有光電信號由皮安表檢測,測量結(jié)果傳輸?shù)接嬎銠C(jī)進(jìn)行數(shù)據(jù)存儲和計算。
FTIR光譜儀:在測量設(shè)施中,選擇InGaAs探測器作為VERTEX80的探測器。測量的光譜范圍設(shè)置在11764cm-1(850nm)到4148cm-1(2410nm),光譜分辨率設(shè)置為64cm1(4.6nm到36.6nm)。選擇此分辨率是因為SD反射率的光譜特性(光譜平坦性)以及在測量反射輻射時信噪比(SNR)的提高。在反傅里葉變換過程中,使用BlackmanHarris 4-Term作為加窗函數(shù);零填充因子為2;選擇功率譜模式進(jìn)行相位校正;并選擇絕對最大值作為峰值位置檢索模式。
在測量反射輻射時,F(xiàn)TIR光譜儀使用的電路放大系數(shù)與用于入射輻射的系數(shù)不同,以確保足夠高的信噪比。縮放因子η的計算方法如下:

其中,DNrFTIR(0°;45°;λ)和DNrFTIRX)分別表示FTIR光譜儀在0%45°反射輻射和入射輻射時的數(shù)字量(DN),而DNrInGaAs(0°;45°;λ)和 DNiInGaAs(X)分別表示InGaAs探測器在0°/45°反射輻射和入射輻射時的數(shù)字量(DN)。
將InGaAs探測器在0/45°條件下的入射輻射和反射輻射的DN比值與FTIR光譜儀在相同條件下的DN比值進(jìn)行比較。選擇1200nm和1300nm波段的數(shù)據(jù)進(jìn)行計算。平均縮放因子為99.10。
系統(tǒng)校準(zhǔn)
幾何校準(zhǔn)
設(shè)施的幾何校準(zhǔn)分為兩個主要方面:確定BRDF測量的初始位置(機(jī)器人手臂的旋轉(zhuǎn)中心和旋轉(zhuǎn)臺的原點(diǎn))并驗證旋轉(zhuǎn)角度的不確定性。
機(jī)器人手臂的旋轉(zhuǎn)中心位于旋轉(zhuǎn)臺的旋轉(zhuǎn)軸與球體輻射器開口中心線的法線的交點(diǎn)處。測量前,需要確定樣品的初始位置。
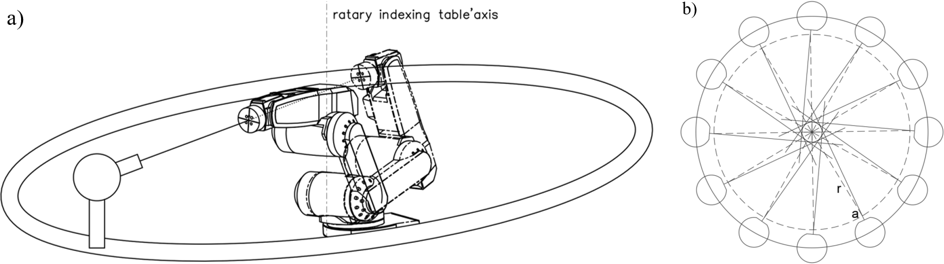
圖7 (a) 測量光束的原理 (b) 通過測量光束確定旋轉(zhuǎn)軸的原理
使用從球體輻射器開口發(fā)出的激光束作為指示器,并使用機(jī)器人手臂作為測量工具(測量原理如圖7a所示),通過測量在不同角度下從球體輻射器開口發(fā)出的激光束(測量示意圖如圖7b所示)獲得旋轉(zhuǎn)臺的空間線性方程,并初步建立機(jī)器人的基座坐標(biāo)系與實驗室坐標(biāo)系之間的轉(zhuǎn)換關(guān)系。然后,將激光束調(diào)整為垂直于旋轉(zhuǎn)臺的旋轉(zhuǎn)軸,并根據(jù)入射激光束在工具坐標(biāo)系Y軸上的位置和軸線方程確定實驗室坐標(biāo)原點(diǎn)的位置和兩個坐標(biāo)系的變換關(guān)系。建立儀器的校準(zhǔn)模型,計算旋轉(zhuǎn)中心在空間中的位置和姿態(tài),并確定樣品的初始位置。這種校準(zhǔn)方法在文獻(xiàn)中有詳細(xì)描述。

圖8 (a) 逆時針旋轉(zhuǎn)輻射源并收集反射輻射 (b) 順時針旋轉(zhuǎn)輻射源并收集反射輻射。
如果逆時針旋轉(zhuǎn)的角度是θal,θa2,···,θa10,順時針旋轉(zhuǎn)的角度是θb1,θb2,···,θb10,且校正前的原點(diǎn)角度為△θ,則

旋轉(zhuǎn)階段原點(diǎn)的校正值可以使用方程(11)計算。校正后,反射輻射如圖9所示。DN(θai)和DN(θbi)的相對偏差小于0.2%:
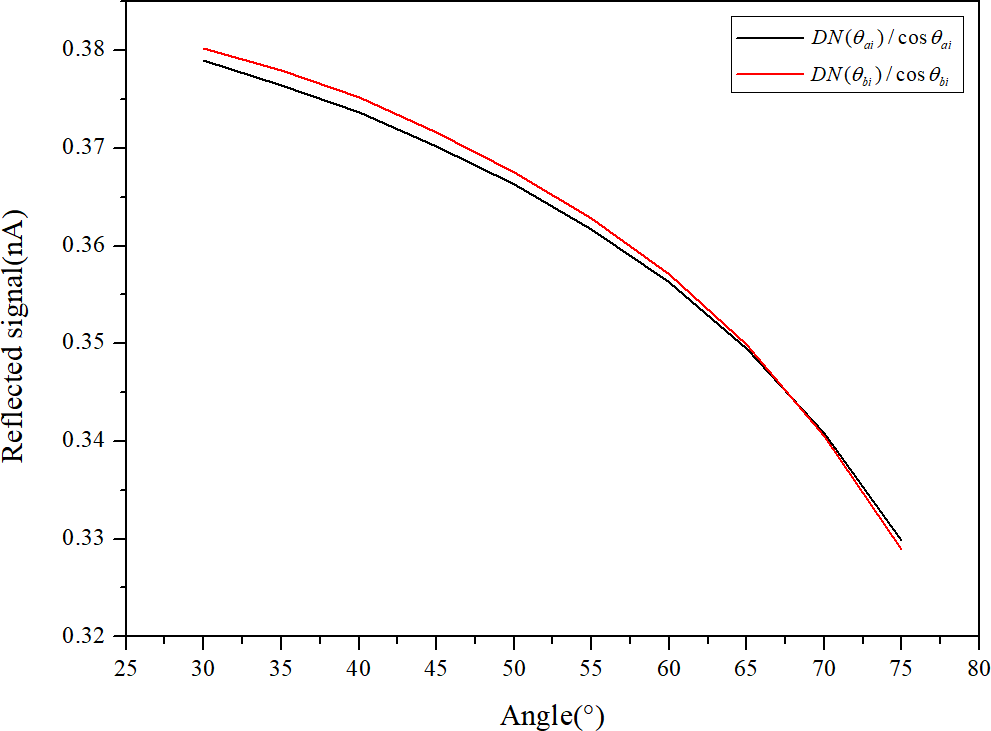
圖9 校正后在不同入射角下的反射輻射
采用基于鏡面反射原理的檢測方法來驗證測角儀系統(tǒng)的角度不確定性。將坐標(biāo)紙的原點(diǎn)放置在入射光束中心點(diǎn)處,前提是輻射源逆時針旋轉(zhuǎn)180°后。假設(shè)輻射源的逆時針旋轉(zhuǎn)角度為△δ,然后調(diào)整機(jī)器A,1使反射器繞Y軸旋轉(zhuǎn)△δ/2,并記錄此時反射光束中心點(diǎn)的位置。實驗示意圖如圖10所示。
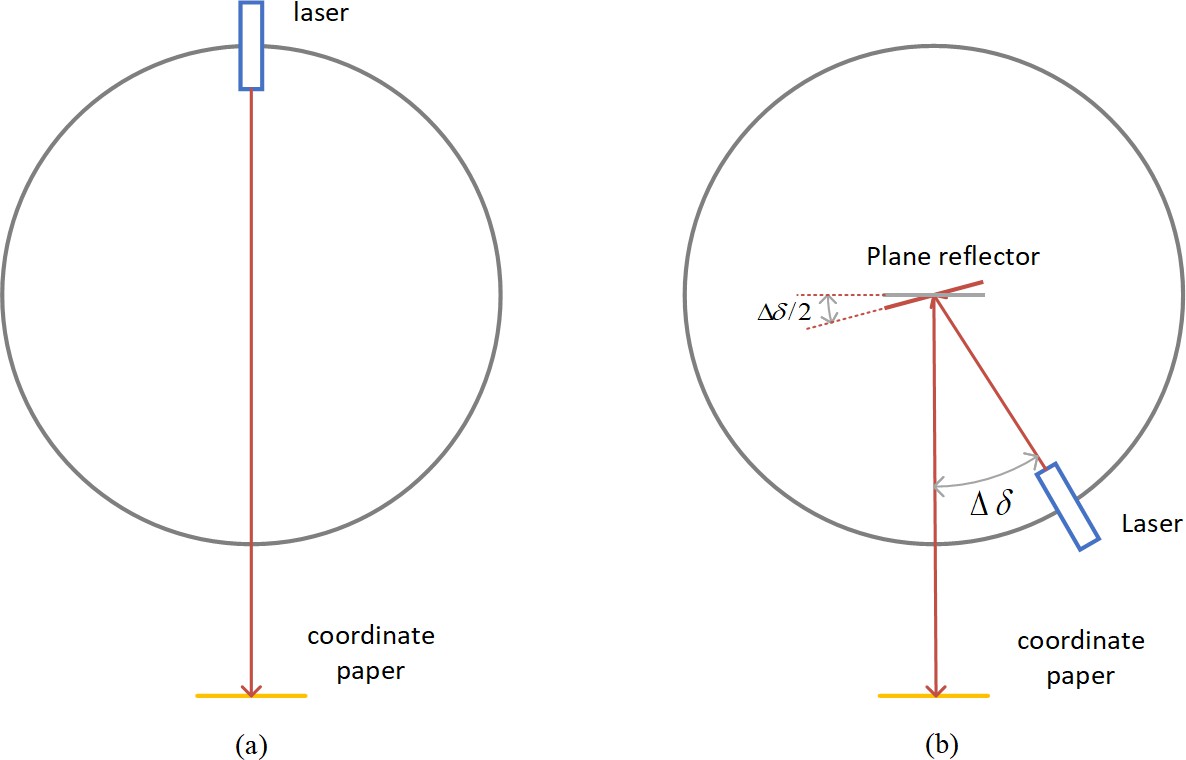
圖10 (a) 確定坐標(biāo)紙的原點(diǎn) (b) 鏡面反射測試
Δδ 的范圍設(shè)置為6°到75°,并每隔3°進(jìn)行一次測量。坐標(biāo)紙與旋轉(zhuǎn)中心之間的距離為1900毫米。實驗結(jié)果如圖11所示,在每個點(diǎn)旁邊標(biāo)記了測量點(diǎn)時的入射角。

圖11 基于鏡面反射的反射光斑位置數(shù)據(jù)測量(每個點(diǎn)旁邊標(biāo)記了入射角)
角度誤差△θ可以表示為:
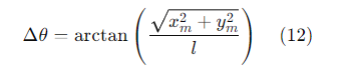
其中,xm和ym分別表示當(dāng)前角度下反射光斑在坐標(biāo)紙上的水平和垂直坐標(biāo);l表示坐標(biāo)紙與旋轉(zhuǎn)中心之間的距離。根據(jù)圖11并使用方程(12)計算結(jié)果,最大偏差角為0.0769°,這意味著測角儀系統(tǒng)的角度精度小于0.1°。
檢測系統(tǒng)的非線性校準(zhǔn)
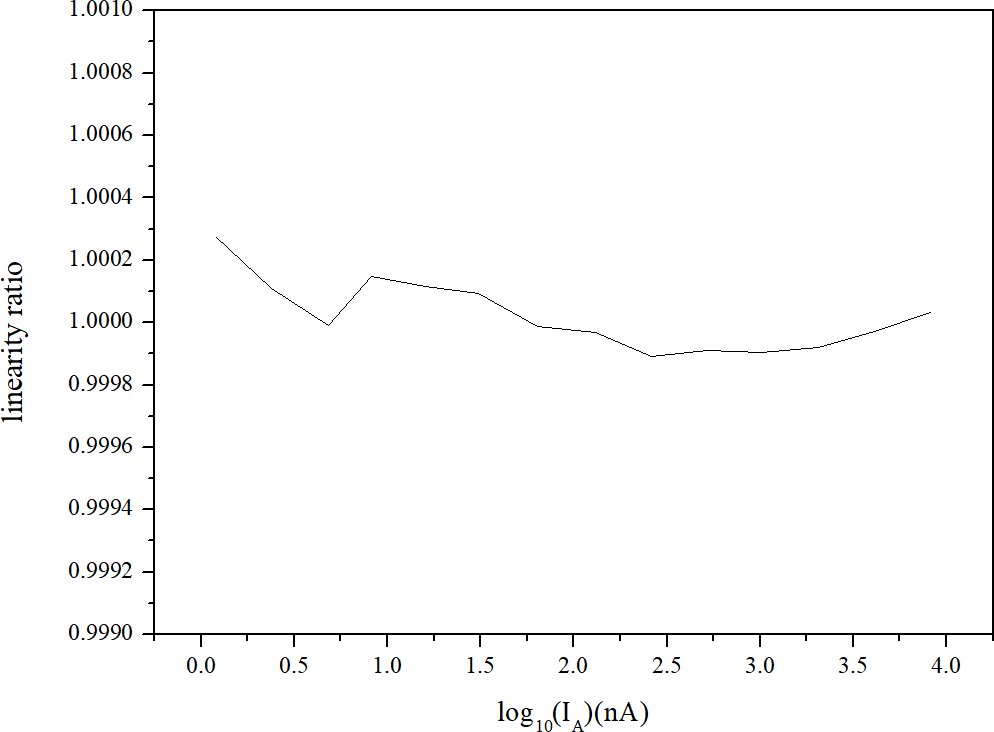
圖12 探測器非線性測量結(jié)果
350 nm到1000 nm:采用基于積分球內(nèi)兩個發(fā)光二極管(LED)通量疊加的方法來檢測探測器系統(tǒng)的非線性。測量范圍為12 pA到364 nA,匹配了設(shè)施的動態(tài)范圍。測量結(jié)果如圖12所示。
1000 nm到2400 nm:FTIR光譜儀的線性不確定性由制造商測量,值為0.02%
設(shè)施的絕對測量工作流程
設(shè)施的測量步驟如下所示。首先,機(jī)器人夾持樣品并將其移至避讓位置,然后將輻射源從旋轉(zhuǎn)臺原點(diǎn)逆時針旋轉(zhuǎn)180°。測量所需波長下的入射輻射。然后,軟件控制輻射源和樣品移動到所需測量位置,并測量樣品的反射輻射。在反射輻射測量完成后,設(shè)施返回并再次測量入射輻射。軟件可以通過設(shè)置反射輻射采集的數(shù)量來控制入射輻射的采集頻率。通常,將反射輻射的采集次數(shù)設(shè)為10次,以確保入射輻射測量間隔不超過15分鐘。測量過程的照片如圖13a和13b所示。

圖13 (a) 輻射源輻射的測量 (b) 樣品反射輻射的測量。
4.用于在軌校準(zhǔn)的SD BRDF測量
SD BRDF測量角度的確定
在軌校準(zhǔn)通常在衛(wèi)星點(diǎn)亮后和衛(wèi)星次點(diǎn)亮前進(jìn)行(圖14)。基于對國際衛(wèi)星上高光譜儀器觀測結(jié)果的分析,在軌校準(zhǔn)容易受到來自地球和大氣層的散射和反射雜散光的影響。選擇適當(dāng)?shù)奶?地球-衛(wèi)星(SES)角度來進(jìn)行在軌校準(zhǔn)時間,以減少這種影響。例如,在溫室氣體觀測衛(wèi)星(GOSAT)上的在軌校準(zhǔn)SES角度剛好高于105°[28]。
在確定衛(wèi)星校準(zhǔn)時間和衛(wèi)星軌道參數(shù)后,也就確定了入射光束的仰角和方位角。根據(jù)基于SD的在軌校準(zhǔn)設(shè)施的設(shè)計要求,還可以確定校準(zhǔn)時間時有效載荷中心軸(觀測方向)的方向。
SD的姿態(tài)由入射方向和觀測方向的矢量決定。要求入射方向和觀測方向的天頂角盡可能小,并避免入射方位角和觀測方位角的鏡像位置。
然而,如果入射矢量和觀測矢量之間的角度較大,無論SD如何放置,都無法減小入射方向和觀測方向的天頂角。如果觀測方向的天頂角過大,為了確保探測器的整個視場都被覆蓋,SD的光學(xué)表面的尺寸將會增加。過大的SD會占用大量空間,影響衛(wèi)星中其他系統(tǒng)的設(shè)計。因此,通常會設(shè)計一個較大的觀測天頂角和較小的反射天頂角.

圖14 在軌校準(zhǔn)時間的示意圖
基于互易定理的改進(jìn)數(shù)據(jù)處理方法用于測量大角度BRDF
根據(jù)方程(5),絕對BRDF測量的不確定性可能與入射角的不確定性有關(guān),且與入射角相關(guān)的相對不確定性成分uθi,為:
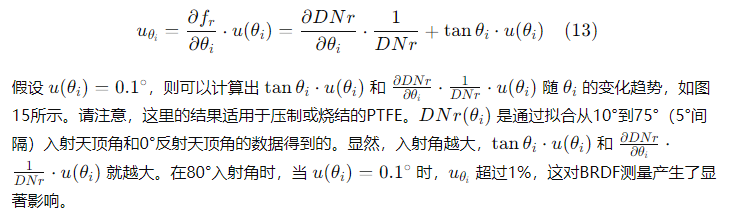
對于壓制的PTFE,角度對DNr(θi,Φi;θr,θr;λ)的影響較小。在入射角和反射角較大的極端情況下,與角度相關(guān)的反射輻射分量的相對不確定性在u(θ)=0.1°時小于0.15%。在大入射角下,角度不確定性對DNr(θi,Φi;θr,θr;λ)的影響遠(yuǎn)小于對cosθi的影響。因此,設(shè)計了一種基于互易定理的改進(jìn)數(shù)據(jù)處理方法,用于測量大角度BRDF。該方法的原理是,以垂直檢測為參考,通過比較傾斜觀測和垂直觀測的BRDF來獲得傾斜觀測的BRDF。
根據(jù)方程(5),絕對BRDF測量的不確定性可能與入射角的不確定性有關(guān),且與入射角相關(guān)的相對不確定性成分uθi,為:


對于壓制的PTFE,角度對DNr(θi,Φi;θr,θr;λ)的影響較小。在入射角和反射角較大的極端情況下,與角度相關(guān)的反射輻射分量的相對不確定性在u(θ)=0.1°時小于0.15%。在大入射角下,角度不確定性對DNr(θi,Φi;θr,θr;λ)的影響遠(yuǎn)小于對cosθi的影響。因此,設(shè)計了一種基于互易定理的改進(jìn)數(shù)據(jù)處理方法,用于測量大角度BRDF。該方法的原理是,以垂直檢測為參考,通過比較傾斜觀測和垂直觀測的BRDF來獲得傾斜觀測的BRDF。

圖15 與入射角相關(guān)的相對不確定性成分
互易定理描述了光路的可逆性。它指的是在表面或被動介質(zhì)上進(jìn)行任意反射或折射后,光束發(fā)射的能量與光束沿相反路徑發(fā)射的能量相等。當(dāng)應(yīng)用于BRDF時,當(dāng)入射角和反射角互換時,BRDF保持不變:

與傾斜照明(θ≠0°)相比,垂直照明(0;=0°)時,方程(12)中θi的影響最小。因此,使用在0°45°條件下測量的BRDF作為參考,來獲得相同輻照度下其他角度的BRDF。然后,


其中DNi代表入射輻亮度的DNi值。根據(jù)方程(14),

對于其他非垂直輻照條件,
改進(jìn)的數(shù)據(jù)處理方法的測量過程如圖16所示。
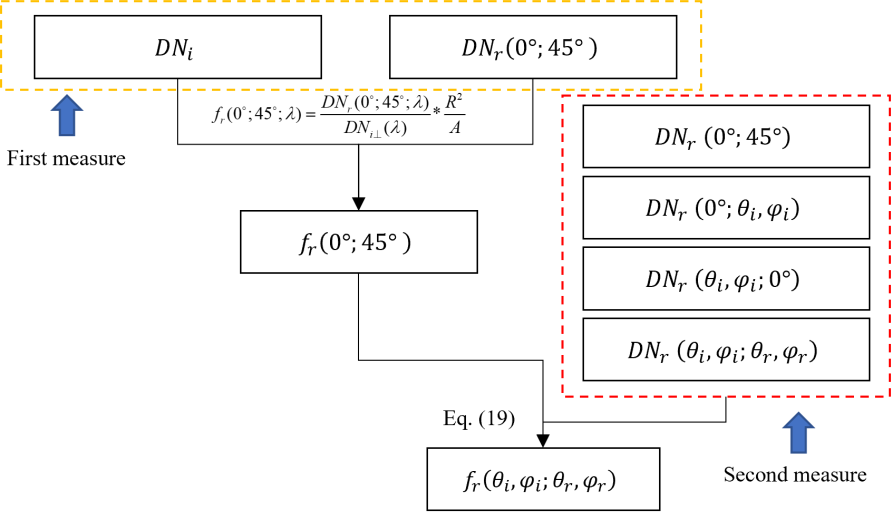
圖16 改進(jìn)的數(shù)據(jù)處理方法的測量過程

















































